III. Плоскопараллельное движение твердого тела
Плоским или плоскопараллельным движением твердого тела называется такое его движение, при котором каждая точка тела движется в плоскости, параллельной некоторой неподвижной плоскости, например движение колеса вагона на прямолинейном участке пути, движение шатуна кривошипно-шатунного механизма.
Рассмотрим движение плоской фигуры, представляющей собой сечение тела, находящегося в плоском движении, плоскостью II, параллельной неподвижной плоскости I (рис 9, а).
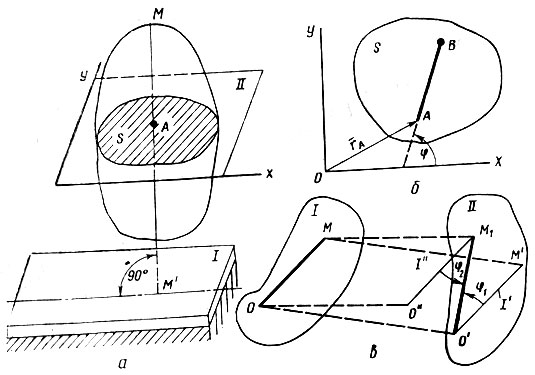
Рис. 9
При плоском движении все точки тела, лежащие на прямой MM', перпендикулярной к сечению S, т. е. к плоскости I, движутся тождественно. Поэтому вместо плоского движения тела достаточно изучить движение плоской фигуры в ее плоскости.
В кинематике твердого тела изучается три основных вопроса: задание движения тела, вычисление скорости какой-либо его точки и вычисление ее ускорения. Кроме этих вопросов изучаются и другие вопросы, представляющие научный и технический интерес.
Положение движущейся плоской фигуры в ее плоскости относительно неподвижной системы осей координат Oxy определяется положением какого-либо отрезка, жестко связанного с этой фигурой (рис. 9, б).
Положение отрезка AB можно определить, зная радиус-вектор  точки A и угол φ, который образует отрезок AB с осью Ox. Точку A называют полюсом. При движении тела величины и φ будут изменяться в зависимости от времени, т. е.
точки A и угол φ, который образует отрезок AB с осью Ox. Точку A называют полюсом. При движении тела величины и φ будут изменяться в зависимости от времени, т. е.


Уравнения (44) и (45) называются уравнениями плоского движения твердого тела.
Теорема.Всякое перемещение плоской фигуры в ее плоскости можно представить как совокупность двух перемещений: 1) поступательного перемещения, зависящего от выбора полюса; 2) вращательного перемещения вокруг полюса; угол и направление поворота от выбора полюса не зависят.
Доказательство. Пусть в момент времени t фигура занимала положение I (рис. 9, в), а в момент времени  - положение II. Переместим сначала фигуру поступательно в положение I', а затем повернем ее на угол φ1 вокруг точки O'. Заметим, что поступательное перемещение зависит от выбора полюса, а угол поворота не зависит от него. Действительно, тот же переход из положения I в положение II можно осуществить, приняв за полюс точку M и переместив сначала фигуру в положение I" (причем все точки фигуры получат перемещения, геометрически равные MM1 и отличные от OO'), а затем повернув фигуру на
- положение II. Переместим сначала фигуру поступательно в положение I', а затем повернем ее на угол φ1 вокруг точки O'. Заметим, что поступательное перемещение зависит от выбора полюса, а угол поворота не зависит от него. Действительно, тот же переход из положения I в положение II можно осуществить, приняв за полюс точку M и переместив сначала фигуру в положение I" (причем все точки фигуры получат перемещения, геометрически равные MM1 и отличные от OO'), а затем повернув фигуру на  вокруг точки M1.
вокруг точки M1.
Но углы

так как отрезки  параллельны и повороты вокруг точек
параллельны и повороты вокруг точек  происходят в одну сторону.
происходят в одну сторону.
Продифференцировав равенство (46), получим

т. е. угловая скорость и угловое ускорение не зависят от выбора полюса плоской фигуры при плоском ее движении.
Положение любой точки M плоской фигуры можно определить радиусом-вектором (рис. 10, а)

где - радиус-вектор полюса A;

- вектор, определяющий положение точки M относительно системы  перемещающейся вместе с полюсом A поступательно (движение тела по отношению к этой системе представляет собой вращение вокруг полюса).
перемещающейся вместе с полюсом A поступательно (движение тела по отношению к этой системе представляет собой вращение вокруг полюса).
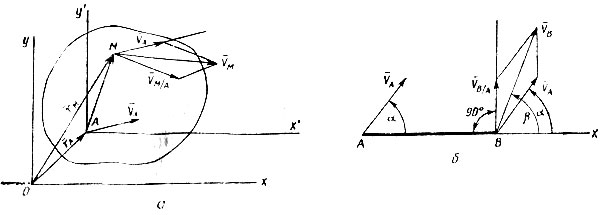
Рис. 10
Так как вектор скорости какой-либо точки равен, производной по времени от ее радиуса-вектора,  продифференцировав радиус-вектор гм% определяемый зависимостью (48), получим скорость точки M
продифференцировав радиус-вектор гм% определяемый зависимостью (48), получим скорость точки M

где  - скорость полюса A;
- скорость полюса A;

- производная, равная вектору скорости  которую точка M получит при
которую точка M получит при  т. е. относительно системы или, иначе, при вращении тела вокруг полюса A. Следовательно, скорость точки M во вращательном движении вокруг полюса A по модулю равна:
т. е. относительно системы или, иначе, при вращении тела вокруг полюса A. Следовательно, скорость точки M во вращательном движении вокруг полюса A по модулю равна:

и направлена перпендикулярно к отрезку AM в сторону вращения фигуры вокруг полюса.
Итак,

т. е. скорость любой точки M плоской фигуры в плоском движении равна геометрической сумме скоростей полюса и скорости рассматриваемой точки при вращении фигуры вокруг полюса.
Теорема.Проекции скоростей точек плоской фигуры на ось, проходящую через эти точки, равны (рис. 10, б).
Доказательство. Пусть  - скорости соответственно точек A и B (рис. 10, б). Приняв точку A за полюс, можем записать
- скорости соответственно точек A и B (рис. 10, б). Приняв точку A за полюс, можем записать

Проектируя обе части написанного векторного равенства на ось Ax и учитывая, что вектор  перпендикулярен к AB, находим
перпендикулярен к AB, находим

что и требовалось доказать.
Теорема.При движении плоской фигуры в ее плоскости в каждый данный момент времени на фигуре найдется такая точка, скорость которой равна нулю. Эта точка называется мгновенным центром скоростей.
Доказательство. Пусть в момент времени t скорости точек A и B соответственно (рис. 11, а). Проведем Перпендикуляры к векторам скоростей из точек A и B до их взаимного пересечения в точке P. Докажем, что скорость точки P в данный момент времени равна нулю.
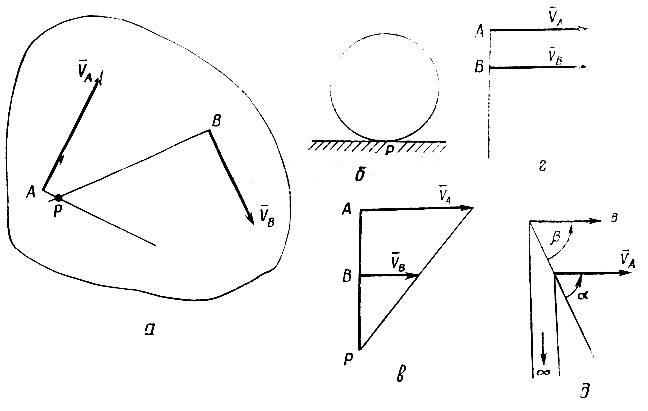
Рис. 11
Предположим, что скорость точки P не равна нулю:  Тогда по теореме о проекциях скоростей концов на направление самого отрезка вектор скорости этой точки
Тогда по теореме о проекциях скоростей концов на направление самого отрезка вектор скорости этой точки  должен быть перпендикулярен одновременно к отрезкам
должен быть перпендикулярен одновременно к отрезкам  что невозможно. Поэтому предположение, что скорость точки P не равна нулю, неверно: Следовательно, скорость точки P равна нулю. Из этой теоремы следует, что никакая другая точка тела в этот момент времени не может иметь скорость, равную нулю. Возьмем, например, точку C. Для точки C проекция
что невозможно. Поэтому предположение, что скорость точки P не равна нулю, неверно: Следовательно, скорость точки P равна нулю. Из этой теоремы следует, что никакая другая точка тела в этот момент времени не может иметь скорость, равную нулю. Возьмем, например, точку C. Для точки C проекция  на направление отрезка BC не равна нулю, так как проекция скорости точки B на направление BC не равна нулю.
на направление отрезка BC не равна нулю, так как проекция скорости точки B на направление BC не равна нулю.
Возьмем за полюс мгновенный центр скоростей P. Тогда скорость какой-либо точки A может быть записана в виде

но  Следовательно, скорость любой точки плоской фигуры при плоском ее движении равна вращательной скорости вокруг мгновенного центра скоростей P и направлена перпендикулярно к отрезку, соединяющему данную точку с мгновенным центром скоростей, в сторону вращения фигуры и равна произведению угловой скорости фигуры на длину этого отрезка. Поэтому Мгновенный центр скоростей называют еще и центром мгновенного вращения.
Следовательно, скорость любой точки плоской фигуры при плоском ее движении равна вращательной скорости вокруг мгновенного центра скоростей P и направлена перпендикулярно к отрезку, соединяющему данную точку с мгновенным центром скоростей, в сторону вращения фигуры и равна произведению угловой скорости фигуры на длину этого отрезка. Поэтому Мгновенный центр скоростей называют еще и центром мгновенного вращения.
Например, модули скоростей точек A и B можно написать в виде

т. е. скорости точек плоской фигуры при плоском ее движении пропорциональны их расстояниям до мгновенного центра скоростей. Из формул (55) легко найти угловую скорость Плоской фигуры

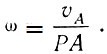
Мгновенный центр скоростей цилиндрического тела, движущегося плоскопараллельно без проскальзывания по неподвижной поверхности, находится в точке касания с поверхностью (в точке P), так как точки касания обоих тел при отсутствии скольжения должны иметь одинаковое скорости, второе же тело Неподвижно. Например, мгновенный центр скоростей колеса, движущегося на прямолинейном участке пути, находится в точке касания его с рельсом (рис. 11, б).
В некоторый момент времени у тела, движущегося плоскопараллельно, в точке A известна скорость по модулю и направлению, а в точке B - только по направлению ((рис. 11, а). В этом случае мгновенный центр скоростей лежит в точке пересечения перпендикуляров, восстановленных к векторам скоростей в точках A и B.
Угловая скорость тела определится по формуле
Тогда скорость точки B
Подставив сюда значение угловой скорости, получим
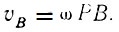
В некоторый момент времени у тела, находящегося в плоском движении, скорости точек A и B известны по модулю, перпендикулярны к отрезку AB и параллельны между собой. В этом случае мгновенный центр скоростей находится в точке P - точке пересечения прямой AB с прямой, соединяющей концы векторов скоростей  (рис. 11, в).
(рис. 11, в).
Действительно, так как модули скоростей точек фигуры пропорциональны их расстояниям от мгновенного центра, т. е.
то концы скоростей точек A и B лежат на прямой, проходящей через мгновенный центр скоростей фигуры.
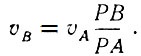
В случае параллельности векторов скоростей соответственно точек A и B тела, находящегося в плоском движении, и их перпендикулярности к отрезку AB мгновенный центр скоростей находится в бесконечности  рис. 11, г), а угловая скорость вращения тела равна нулю:
рис. 11, г), а угловая скорость вращения тела равна нулю:
Это справедливой при  не перпендикулярны к отрезку AB (рис. 11, д). По Теореме о проекциях скоростей
не перпендикулярны к отрезку AB (рис. 11, д). По Теореме о проекциях скоростей

но  поэтому
поэтому  а точки A или B - любые. Следовательно, в рассматриваемом случае в данный момент распределение Скоростей всех точек тела такое же, как при поступательном движении.
а точки A или B - любые. Следовательно, в рассматриваемом случае в данный момент распределение Скоростей всех точек тела такое же, как при поступательном движении.
Для вычисления ускорения какой-либо точки M фигуры, находящейся в плоском движении, продифференцируем вектор ее скорости, определяемый равенством (52):
где  - ускорение полюса;
- ускорение полюса;
- ускорение точки M при ее вращении вместе с фигурой вокруг полюса A.
Следовательно,

Но вектор ускорения  можно представить в виде векторной суммы вращательного
можно представить в виде векторной суммы вращательного  и центростремительного
и центростремительного  ускорений рассматриваемой точки M во вращательном движении ее вокруг полюса A (рис. 12, а)
ускорений рассматриваемой точки M во вращательном движении ее вокруг полюса A (рис. 12, а)

Итак,

т. е. ускорение любой точки плоской фигуры равно геометрической сумме ускорения полюса и ускорения этой точки во вращательном движении вокруг полюса.
Модуль ускорения точки M относительно полюса A

или

Теорема. При плоском движении фигуры в любой момент времени на ней найдется такая точка, ускорение которой равно нулю. Эта точка называется мгновенным центром ускорений.
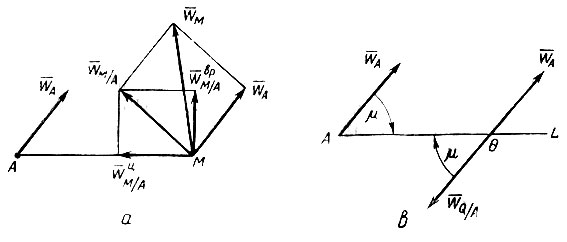
Рис. 12
Доказательство. Пусть при плоском движении фигуры (рис. 12, б) какая-либо ее точка A имеет вектор ускорения  Проведем из точки A полупрямую AL под углом μ к вектору определяемым равенством:
Проведем из точки A полупрямую AL под углом μ к вектору определяемым равенством:

Этот угол отложен против часовой стрелки при  и по ходу часовой стрелки при
и по ходу часовой стрелки при 
На полупрямой AL отложим от точки A отрезок AQ, длина которого вычисляется по формуле

Докажем, что точка Q будет мгновенным центром ускорений, т. е.  Примем точку Q за полюс. Тогда можно написать
Примем точку Q за полюс. Тогда можно написать

Модуль ускорения вектора  определим по формуле (61)
определим по формуле (61)

Подставив в эту формулу значение AQ из равенства (63), получим

Угол между  равен μ, поэтому векторы
равен μ, поэтому векторы  направлены в прямо противоположные стороны. Следовательно,
направлены в прямо противоположные стороны. Следовательно,  и в соответствии с формулой (64)
и в соответствии с формулой (64)

что потребовалось доказать.
Если одновременно  то из формулы (61) следует, что
то из формулы (61) следует, что  Тогда из равенства (64)
Тогда из равенства (64)  т. е. ускорения всех точек плоской фигуры равны между собой.
т. е. ускорения всех точек плоской фигуры равны между собой.
Если точку Q (мгновенный центр ускорений) принять за полюс, го ускорение точки А рассматриваемой фигуры можно записать в виде

или по модулю

а точки M - в виде

или по модулю

Поделив модуль ускорения точки A на модуль ускорения точки M, получим

т. е. ускорения точек пела, находящегося в плоском движении, пропорциональны их расстояниям от мгновенного центра ускорений. Причем углы, образованные векторами ускорений этих точек и соответствующими радиусами-векторами этих точек, одинаковы.
Пример 5. Вагон трамвая движется по прямолинейному горизонтальному участку пути с замедлением  имея в данный момент скорость
имея в данный момент скорость  Колеса катятся по рельсам без скольжения. Вычислить скорости и ускорения концов двух диаметров ротора, образующих с вертикалью углы по 45°, если радиус колеса R = 0,5 м, а ротора r = 0,25 м (рис. 13).
Колеса катятся по рельсам без скольжения. Вычислить скорости и ускорения концов двух диаметров ротора, образующих с вертикалью углы по 45°, если радиус колеса R = 0,5 м, а ротора r = 0,25 м (рис. 13).
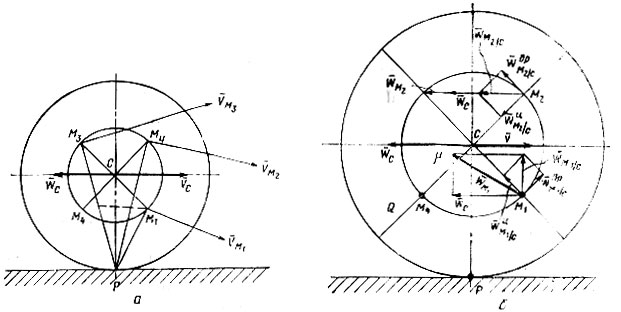
Рис. 13
Решение. Колесо совершает плоское движение. Мгновенный центр скоростей колеса находится в точке P контакта колеса с рельсом. Поэтому угловая скорость колеса
Продифференцировав угловую скорость по времени, получим

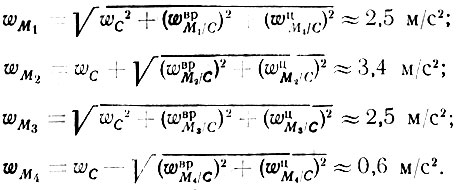
При  значение угловой скорости составит 2 1/с. Скорости точек M1, M2, M3 и M4 согласно формулам (55) соответственно равны:
значение угловой скорости составит 2 1/с. Скорости точек M1, M2, M3 и M4 согласно формулам (55) соответственно равны:

так как (см. рис. 13)

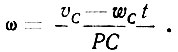
Ускорения точек M1, M2, M3 и M4 согласно векторной формуле (59)

где  - ускорение центра колеса C, принятого за полюс;
- ускорение центра колеса C, принятого за полюс; 
Вращательные и центростремительные ускорения рассматриваемых точек, очевидно, будут равны:

Поэтому ускорения этих точек (рис. 13, б) соответственно равны:
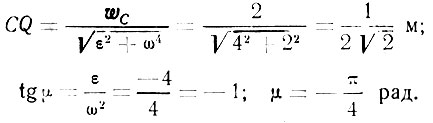
Положение мгновенного центра ускорений определим по формулам (62) и (63):
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://railway-transport.ru/ 'Железнодорожный транспорт'