IV. Сложное (составное) движение точки
Сложным движением точки называется такое ее движение, при котором она движется относительно системы отсчета, перемещающейся по отношению к некоторой другой, принятой за неподвижную (рис. 14).
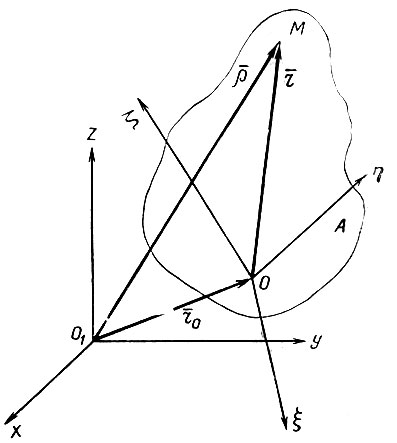
Рис. 14
Уравнение движения точки, находящейся в сложном движении, можно задать векторным способом

где  - радиус-вектор точки M, определяющий ее положение относительно неподвижной системы отсчета
- радиус-вектор точки M, определяющий ее положение относительно неподвижной системы отсчета 

- радиус-вектор, определяющий положение начала отсчета подвижной системы координат 

- радиус-вектор рассматриваемой точки M, определяющий ее положение относительно подвижной системы координат.
Во все время движения точки M эти радиусы-векторы связаны зависимостью (67), которая и является векторным способом задания движения точки, находящейся в сложном движении.
Для вычисления скорости точки, находящейся в сложном движении, продифференцируем ее радиус-вектор, определяемый зависимостью (67),
где  - вектор скорости рассматриваемой точки относительно неподвижной системы отсчета
- вектор скорости рассматриваемой точки относительно неподвижной системы отсчета  называемый абсолютной скоростью точки M;
называемый абсолютной скоростью точки M;
- вектор скорости начала подвижной системы относительно неподвижной системы отсчета.
Производная  может быть вычислена на основании теоремы об абсолютной производной заданного в подвижной системе координат вектора, согласно которой абсолютная производная (т. е. производная, взятая в неподвижной системе координат) равна геометрической сумме относительной производной вектора, взятой в подвижной системе координат, и векторного произведения угловой скорости подвижной системы отсчета на дифференцируемый вектор
может быть вычислена на основании теоремы об абсолютной производной заданного в подвижной системе координат вектора, согласно которой абсолютная производная (т. е. производная, взятая в неподвижной системе координат) равна геометрической сумме относительной производной вектора, взятой в подвижной системе координат, и векторного произведения угловой скорости подвижной системы отсчета на дифференцируемый вектор

Здесь  - скорость рассматриваемой точки, обусловленная движением подвижной системы отсчета;
- скорость рассматриваемой точки, обусловленная движением подвижной системы отсчета;

- скорость рассматриваемой точки относительно подвижной системы отсчета, называемая относительной скоростью.
Итак,
Первых два слагаемых  обусловлены движением подвижной системы отсчета - переносным движением. Эта сумма называемся переносной скоростью и обозначается
обусловлены движением подвижной системы отсчета - переносным движением. Эта сумма называемся переносной скоростью и обозначается 
Следовательно, 
или

т. е. абсолютная скорость точки, находящейся в сложном движении, равна векторной сумме переносной и относительной скоростей.
Для вычисления ускорения точки, находящейся в сложном движении, продифференцируем ее вектор скорости, определяемый зависимостью (69),

Применив теорему об абсолютной производной к векторам  получим
получим

Перепишем равенство (71):

или

где  - абсолютное ускорение точки, находящейся в сложном движении.
- абсолютное ускорение точки, находящейся в сложном движении.
Сумма  называется переносным ускорением, так как при отсутствии переносного движения
называется переносным ускорением, так как при отсутствии переносного движения  и вся сумма равна нулю.
и вся сумма равна нулю.
Два предпоследних слагаемых

обусловлены наличием переносного вращательного движения с угловой  и относительной
и относительной  скоростями. Это ускорение называется поворотным ускорением или ускорением Кориолиса и обозначается
скоростями. Это ускорение называется поворотным ускорением или ускорением Кориолиса и обозначается 
Наконец, производная от вектора  относительной скорости в предположении, что переносное движение отсутствует, называется относительным ускорением и обозначается
относительной скорости в предположении, что переносное движение отсутствует, называется относительным ускорением и обозначается 
Равенство (73) запишется в виде

которое и выражает теорему Кориолиса: в случае непоступательного переносного движения абсолютное ускорение точки равно векторной сумме переносного, относительного и поворотного ускорений.
В случае поступательного переносного движения  и ускорение Кориолиса будет равно нулю, поэтому
и ускорение Кориолиса будет равно нулю, поэтому

т. е. в случае поступательного переносного
движения абсолютное ускорение точкой равно векторной; сумме переносного и относительного ускорений.
Модуль ускорения Кориолиса определяется как модуль векторного произведения двух векторов

Отсюда следует, что ускорение Кориолиса равно нулю в трех случаях:
- если
 т. е. в случае поступательного переносного движения или в моменты обращения в нуль угловой скорости непоступательного переносного движения;
т. е. в случае поступательного переносного движения или в моменты обращения в нуль угловой скорости непоступательного переносного движения;
- если
 т. е. в случае относительного покоя точки или в моменты обращения в нуль относительной скорости точки;
т. е. в случае относительного покоя точки или в моменты обращения в нуль относительной скорости точки;
- если
 т. е. в случае, когда вектор относительной скорости точки параллелен вектору угловой скорости переносного движения
т. е. в случае, когда вектор относительной скорости точки параллелен вектору угловой скорости переносного движения  как, например, при движении точки вдоль образующей цилиндра, вращающегося вокруг своей оси.
как, например, при движении точки вдоль образующей цилиндра, вращающегося вокруг своей оси.
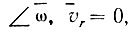
Вектор ускорения Кориюлиса направлен перпендикулярно плоскости, в которой лежат векторы относительной и "угловой скоростей переносного движения, в сторону, откуда виден поворот вектора  к вектору скорости
к вектору скорости  на меньший угол против хода часовой стрелки (рис. 15).
на меньший угол против хода часовой стрелки (рис. 15).
Рис. 15
Пример 6. Точка M (рис. 16) движется равномерно по меридиану с относительной скоростью  Определить абсолютную скорость и абсолютное ускорение точки на широте φ, считая угловую скорость
Определить абсолютную скорость и абсолютное ускорение точки на широте φ, считая угловую скорость  Земли постоянной.
Земли постоянной.
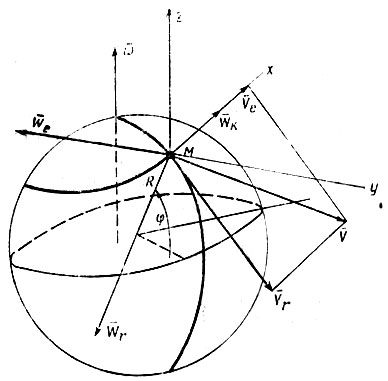
Рис. 16
Решение. За переносное движение примем вращение Земли вокруг своей оси с угловой скоростью , а за относительное движение точки M - движение ее по меридиану (по окружности радиуса R). Точка M находится в сложном движении, поэтому вектор абсолютной скорости ее

Для вычисления вектора  переносной скорости мысленно остановим движение точки и вычислим скорость точки тела, вращающегося вокруг неподвижной оси,
переносной скорости мысленно остановим движение точки и вычислим скорость точки тела, вращающегося вокруг неподвижной оси,
По модулю она равна:
и направлена, как указано на рис. 16.
Вектор абсолютной скорости будет направлен, по диагонали параллелограмма, построенного на векторах относительной и переносной скоростей.
Вектор абсолютного ускорения определится согласно теореме Кориолиса

где  - вектор переносного ускорения, направленный по радиусу параллели к оси вращения Земли и по модулю равный:
- вектор переносного ускорения, направленный по радиусу параллели к оси вращения Земли и по модулю равный: 
Вектор относительного ускорения , вычисляется в предположении, что отсутствует вращение Земли. По модулю он равен:  так как точка движется по окружности (меридиану) радиуса R и направлена по радиусу к центру Земли.
так как точка движется по окружности (меридиану) радиуса R и направлена по радиусу к центру Земли.
Вектор ускорения Кориолиса  согласно формуле (74)
согласно формуле (74)
или по модулю

и направлен по касательной к параллели; так как он должен быть перпендикулярен к векторам 
Для определения модуля ускорения рассматриваемой точки найдем проекции векторов, стоящих в левой и правой частях формулы (75), на декартовы оси:
Следовательно, зная проекции абсолютного ускорения, по известной формуле

вычислим величину ускорения в данной задаче

|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://railway-transport.ru/ 'Железнодорожный транспорт'