I. Кинематика точки
Движение точки может быть задано тремя способами: естественным, векторным и координатным.
При естественном способе задания движения дается траектория, т. е. линия, по которой движется точка (рис. 1, а).
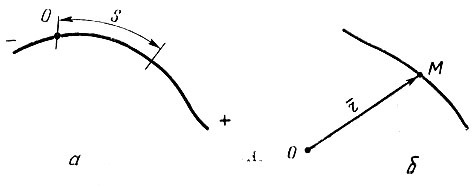
Рис. 1
На этой траектории выбирается некоторая точка О, принимаемая за начало отсчета. Выбираются положительное и отрицательное (направления отсчета дуговой координаты s, определяющей положение точки на траектории. При движении точки расстояние s будет изменяться. Поэтому, чтобы определить положение точки в любой момент времени, достаточно задать дуговую координату s как функцию времени:

Это равенство называется уравнением движения точки по данной траектории.
Итак, движение точки в рассматриваемом случае определяется совокупностью следующих данных: траектории точки, положения начала отсчета дуговой координаты, положительного и отрицательного направлений отсчета и функции 
При векторном способе задания движения точки положение точки M определяется величиной и направлением радиуса-вектора  , проведенного из неподвижного центра О в данную точку (рис. 1, б). При движении точки ее радиус-вектор изменяется по величине и направлению. Поэтому, чтобы определить положение точки в любой момент времени, достаточно задать ее радиус-вектор как функцию времени:
, проведенного из неподвижного центра О в данную точку (рис. 1, б). При движении точки ее радиус-вектор изменяется по величине и направлению. Поэтому, чтобы определить положение точки в любой момент времени, достаточно задать ее радиус-вектор как функцию времени:

Это равенство называется векторным уравнением движения точки.
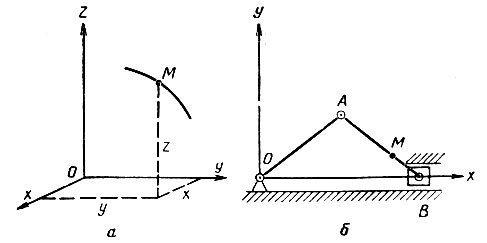
Рис. 2
При координатном способе задания движения положение точки по отношению к выбранной системе отсчета определяется при помощи прямоугольной системы декартовых координат (рис. 2, а). При движении точки ее координаты изменяются с течением времени. Поэтому, чтобы определить положение точки в любой момент времени, достаточно задать координаты x, y, z как функции времени:

Эти равенства называются уравнениями движения точки в прямоугольных декартовых координатах. Движение точки в плоскости определяется двумя уравнениями системы (3), прямолинейное движение - одним.
Между тремя описанными способами задания движения существует взаимная связь, что позволяет от одного способа задания движения перейти к другому. В этом легко убедиться, например, при рассмотрении перехода от координатного способа задания движения к векторному.
Положим, что движение точки задано в виде уравнений (3). Имея в виду, что

и

можно записать

А это и есть уравнение вида (2).
Пример 1. Составить уравнения движения и определить траекторию точки M шатуна кривощипно-шатунного механизма (рис. 2, б), если 
Решение. Как видно из рис. 2, б, уравнения, определяющие координаты точки M, можно записать в виде

или

Определить уравнение траектории - значит исключить из уравнений движения время t. С этой целью проведем необходимые преобразования в полученных выше уравнениях движения:

Возводя в квадрат и складывая левые и правые части, подучим уравнение траектории в виде
Следовательно, точка движется по эллипсу.
Скорость точки является характеристикой быстроты и направления ее движения.
Пусть точка M (рис. 3, а) движется по криволинейной траектории согласно закону  Положим, что в момент времени t точка занимает положение M, а в момент времени
Положим, что в момент времени t точка занимает положение M, а в момент времени  - положение M1, пройдя за время
- положение M1, пройдя за время 
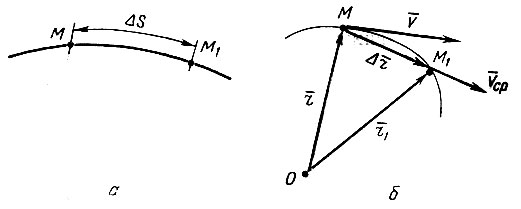
Рис. 3
Отношение приращения дуговой координаты  к промежутку времени Δt, за которое произошло это приращение, называется средней скоростью точки за время Δt
к промежутку времени Δt, за которое произошло это приращение, называется средней скоростью точки за время Δt

Очевидно, что, чем меньше промежуток времени Δt, тем ближе значение  подходит к величине действительной скорости точки в момент времени t. Скоростью называется предел
подходит к величине действительной скорости точки в момент времени t. Скоростью называется предел 
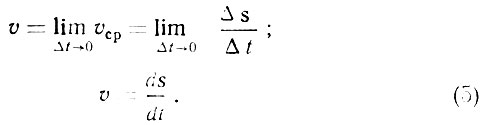
Итак, величина скорости точки равна производной от расстояния (дуговой координаты) по времени. Следовательно, она измеряется в единицах длины, отнесенных к единице времени (м/с, см/с). Формула (5) определяет величину скорости точки.
Чтобы знать не только величину скорости, но и ее направление, введем понятие вектора скорости. Для этого будем определять движение в векторной форме (2). В момент времени t положение точки M (рис. 3, б) определяется радиусом-вектором , а в момент времени , соответствующий положению M1,- радиусом-вектором 
Отношение приращения радиуса-вектора  к промежутку времени Δt, в течение которого произошло это приращение, называется вектором средней скорости точки за время Δt, т. е.
к промежутку времени Δt, в течение которого произошло это приращение, называется вектором средней скорости точки за время Δt, т. е.

Направление вектора  совпадает с направлением вектора . Рассматривая предел отношения (6) при приближении Δt к нулю, получим
совпадает с направлением вектора . Рассматривая предел отношения (6) при приближении Δt к нулю, получим
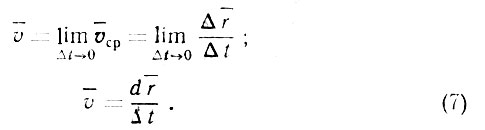
Из равенства (7) следует, что вектор  всегда направлен по касательной к траектории в точке M.
всегда направлен по касательной к траектории в точке M.
Итак, вектор скорости точки равен производной от радиуса-вектора по времени.
Равенство (7) можно представить в виде
Вектор  направлен по касательной к траектории в сторону возрастания дуговой координаты s и равен по модулю единице. Он называется единичным вектором касательной и обозначается
направлен по касательной к траектории в сторону возрастания дуговой координаты s и равен по модулю единице. Он называется единичным вектором касательной и обозначается  Следовательно, можно записать
Следовательно, можно записать
Отсюда следует, что определенная равенством (5) алгебраическая величина  представляет собой проекцию вектора скорости на направление единичного вектора касательной.
представляет собой проекцию вектора скорости на направление единичного вектора касательной.
Пусть движение точки задано уравнениями движения в прямоугольных декартовых координатах:

Так как

то на основании равенства (7) получим

При дифференцировании принимается во внимание, что единичные векторы  постоянны по величине и направлению. Последнее вытекает из того, что система координат неизменно связана с телом отсчета. Коэффициенты при в получением равенстве представляют собой проекции вектора скорости на оси
постоянны по величине и направлению. Последнее вытекает из того, что система координат неизменно связана с телом отсчета. Коэффициенты при в получением равенстве представляют собой проекции вектора скорости на оси  Следовательно,
Следовательно,

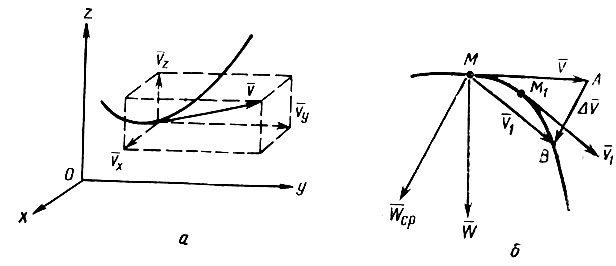
Рис. 4
Таким образом, проекции вектора скорости точки на координатные оси равны первым производным от соответствующих координат точки по времени. Модуль скорости (рис. 4, а) вычисляется по формуле

Направление вектора скорости определяется следующим образом:

Пример 2. Движение точки задано уравнениями:

(t, c; x и y, см). Определить величину и направление скорости при 
Решение. Находим проекции вектора скорости на координатные оси:

Определяем модуль вектора скорости

и его направление

Ускорение точки характеризует быстроту изменения ее скорости. Положим, что точка движется по криволинейной траектории (рис. 4, б). В момент времени t она занимает положение M и имеет скорость v. В момент времени точка занимает положение M1 и имеет скорость  Перенося вектор в точку M и соединяя концы векторов и , получим вектор
Перенося вектор в точку M и соединяя концы векторов и , получим вектор  выражающий приращение вектора скорости за время Δt.
выражающий приращение вектора скорости за время Δt.
Отношение приращения вектора скорости к промежутку времени Δt, в течение которого произошло это приращение, называется средним ускорением за время Δt

Рассмотрим предел выражения (11) при приближении Δt к нулю. Получим истинное ускорение точки в момент времени t, т. е. в положении M,
Таким образом, вектор ускорения равен первой производной от вектора скорости по времени или второй производной от радиуса-вектора по времени.
Заметим, что вектор  находится в плоскости
находится в плоскости  (рис. 4, б), проходящей через касательную к траектории в точке M и параллельной касательной в точке M1. При Δt, стремящемся к нулю, плоскость вращается вокруг касательной MA, будучи все время параллельной вектору . Плоскость, с которой совпадает предельное положение плоскости при
(рис. 4, б), проходящей через касательную к траектории в точке M и параллельной касательной в точке M1. При Δt, стремящемся к нулю, плоскость вращается вокруг касательной MA, будучи все время параллельной вектору . Плоскость, с которой совпадает предельное положение плоскости при  называется соприкасающейся плоскостью к кривой в точке M. Вектор находится все время в плоскости и направлен в сторону вогнутости траектории. Поэтому вектор
называется соприкасающейся плоскостью к кривой в точке M. Вектор находится все время в плоскости и направлен в сторону вогнутости траектории. Поэтому вектор  лежит в соприкасающейся плоскости и тоже направлен в сторону вогнутости траектории. Ускорение измеряется в м/с2, см/с2.
лежит в соприкасающейся плоскости и тоже направлен в сторону вогнутости траектории. Ускорение измеряется в м/с2, см/с2.
При определении ускорения в случае задания движения в прямоугольных координатах, т. е. в виде

последовательность операций аналогична действиям, описанным в разделе 3. Сначала найдем проекции вектора ускорения на координатные оси:

Проекции ускорения точки на координатные оси равны вторым производным от соответствующих координат по времени или первым производным по времени от проекций скорости на соответствующие оси.
Модуль ускорения определяется по формуле

Направление вектора ускорения определяется направляющими косинусами:

Проведем в точке M кривой AB соприкасающуюся плоскость (рис. 5, а), определение которой дано в разделе 4, и плоскость, перпендикулярную к касательной. Эта плоскость называется нормальной плоскостью. Линия пересечения нормальной и соприкасающейся плоскостей называется главной нормалью кривой. Прямая, перпендикулярная к главной нормали и касательной, называется бинормалью.
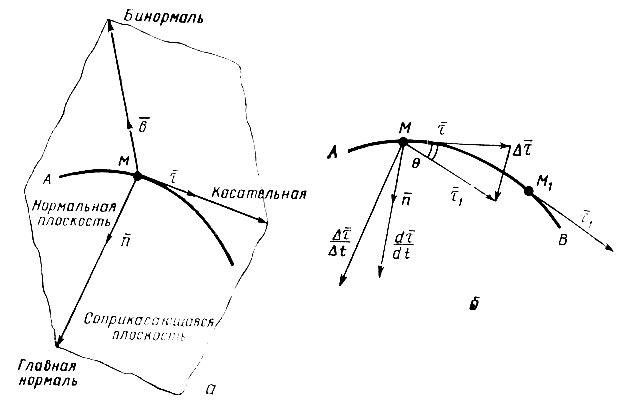
Рис. 5
Рассмотрим три взаимно перпендикулярные оси: касательную, направленную в сторону возрастания дуговой координаты; главную нормаль, направленную в сторону вогнутости кривой; бинормаль, направленную по отношению к двум другим осям подобно тому, как ось Oz направлена по отношению к осям Ox и Oy. Эти три оси называются естественными осями кривой. Единичные векторы этих осей принято обозначать соответственно 
Из курса высшей математики известно, что угол поворота касательной при переходе точки из одного положения в другое называется углом смежности. Предел отношения угла смежности к приращению дуговой координаты Δs, когда она стремится к нулю, называется кривизной k кривой в точке M

Величина ρ, обратная кривизне кривой, называется радиусом кривизны:

Представим вектор скорости в виде произведения его проекции на касательную и единичного вектора  Тогда
Тогда
Величина единичного вектора постоянна, направление же его при движении точки вдоль ее траектории меняемся. Поэтому вектор нельзя рассматривать как постоянный и его" производная по времени не равна нулю. Дифференцируя последнее выражение как произведение двух функций времени, получим

Выясним, чему равна производная  Возьмем на кривой AB (рис. 5, б) два положения движущейся точки M и Mсоответствующие моментам времени t и Орты касательной в этих точках соответственно и
Возьмем на кривой AB (рис. 5, б) два положения движущейся точки M и Mсоответствующие моментам времени t и Орты касательной в этих точках соответственно и  . Перенося в точку M, определим приращение орта
. Перенося в точку M, определим приращение орта  Как видно из рисунка,
Как видно из рисунка,

Следовательно,
Из рис. 5, б видно, что угол, образованный вектором  и касательной,
и касательной,  При
При  и поэтому
и поэтому  Это значит, что вектор
Это значит, что вектор  направлен по нормали к траектории, а так как он лежит в соприкасающейся плоскости, то эта нормаль является главной нормалью.
направлен по нормали к траектории, а так как он лежит в соприкасающейся плоскости, то эта нормаль является главной нормалью.
Значит,
и равенство (18) примет вид

Первое слагаемое суммы (19) называется касательным ускорением точки  второе - нормальным ускорением
второе - нормальным ускорением  Тогда
Тогда

Проекции ускорения на касательную и главную нормаль соответственно равны:


Проекция ускорения на бинормаль всегда равна нулю.
При равномерном движении, когда численное значение скорости и постоянно, касательное ускорение  обращается в нуль. Оно отлично от нуля только при неравномерном движении и поэтому характеризует изменение скорости по величине. При прямолинейном движении, когда радиус кривизны траектории ρ равен бесконечности, нормальное ускорение обращается в нуль. Оно отлично от нуля только при криволинейном движении и, следовательно, характеризует изменение скорости по направлению.
обращается в нуль. Оно отлично от нуля только при неравномерном движении и поэтому характеризует изменение скорости по величине. При прямолинейном движении, когда радиус кривизны траектории ρ равен бесконечности, нормальное ускорение обращается в нуль. Оно отлично от нуля только при криволинейном движении и, следовательно, характеризует изменение скорости по направлению.
Обе составляющие ускорения Обращаются в нуль только При равномерном и прямолинейном движении.
Модуль полного ускорения точки определяется через ее касательное и нормальное ускорения

Неравномерное движение точки называется ускоренным, если модуль скорости возрастает, и замедленным - в противоположном случае. Легко доказать, что движение является ускоренным, если знаки величин  одинаковы, и замедленным, если эти знаки различны. При ускоренном движении вектор касательного ускорения направлен в ту же сторону, что и скорость, при замедленном - в противоположную сторону.
одинаковы, и замедленным, если эти знаки различны. При ускоренном движении вектор касательного ускорения направлен в ту же сторону, что и скорость, при замедленном - в противоположную сторону.
Движение называется равнопеременным в том случае, если касательное ускорение постоянно, т. е.

откуда
Интегрируя последнее выражение и имея в виду, что при  получим
получим

формула (25) определяет скорость равнопеременного движения. Подставляем в нее значение  Интегрируя и имея в виду, что при
Интегрируя и имея в виду, что при  получим
получим

Выражение (26) называют уравнением равнопеременного движения точки по траектории.
Пример 3. Движение точки задано уравнениями:

(t, c; x и y, см). Определить величину и направление ускорения при
Решение. Находим проекции ускорения на координатные оси:

Определяем модуль вектора ускорения

и его направление

|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://railway-transport.ru/ 'Железнодорожный транспорт'