8. Управление электровозами и защита их от ненормальных режимов
Непосредственное и косвенное управление. Контроллеры машиниста
Машинисту приходится управлять электровозом, на котором установлены тяговые двигатели суммарной мощностью несколько тысяч киловатт. Кроме того, на электровозе имеются различные вспомогательные машины, электрические аппараты, тормоза, которые также нужно приводить в действие или выводить из работы. Наряду с этим машинист обязан следить за показаниями путевых сигналов, состоянием пути, контактной сети, заботиться о том, чтобы не боксовали колесные пары, не происходило резких перепадов силы тяги. После пуска и разгона состава машинисту необходимо контролировать скорость движения и приводить ее в соответствие с разрешенной на данном участке.
Очень внимательным должен быть машинист в момент перехода на электрическое торможение, так как может возникнуть круговой огонь на коллекторе из-за сильных толчков тока. Кроме того, в процессе электрического торможения возможен "юз" (заклинивание) колесных пар. Если его быстро не устранить, появляются "ползуны" на бандажах колес и бандажи приходится преждевременно обтачивать.
Для облегчения работы машиниста созданы системы управления различными устройствами электровоза. В первую очередь остановимся на системе управления силовой цепью. Эта система должна обеспечить строгую последовательность включения и выключения индивидуальных контакторов, контакторов группового переключателя и других аппаратов в течение небольшого времени, которое затрачивается на их переключение.
В зависимости от способа переключений электрических аппаратов в силовой цепи электровоза различают систему непосредственного управления и систему косвенного управления.
При системе непосредственного управления (рис. 88) электрические аппараты, включенные в силовую цепь, приводятся в действие непосредственно аппаратом управления - контроллером машиниста.
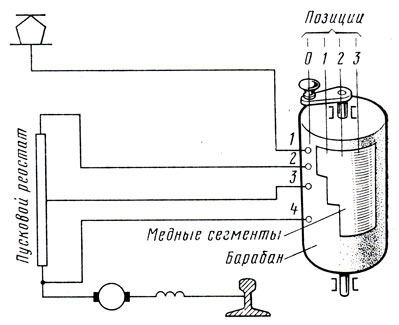
Рис. 88. Схема включения контроллера машиниста при непосредственном управлении тяговыми двигателями
В простейшем случае контроллер имеет барабан из изоляционного материала. На барабане укреплены медные сегменты и неподвижные контактные пальцы, к которым подведены провода от разных элементов схемы. В зависимости от положения (позиции) рукоятки контроллера и конфигурации сегментов барабана они замыкают те или иные контактные пальцы, которые включают или выключают секции пускового резистора и осуществляют другие переключения, изменяющие режим работы тяговых двигателей. Каждая позиция рукоятки контроллера фиксируется специальным механизмом.
На нулевой позиции все контакты разомкнуты и тяговые двигатели отключены от контактного провода. Когда машинист ставит рукоятку контроллера на 1-ю позицию, сегмент барабана замыкает два верхних пальца; при этом образуется следующая цепь тока: токоприемник, пусковой реостат, тяговый двигатель. На 2-й позиции осуществляется электрический контакт между сегментом и третьим пальцем, в результате чего часть пускового реостата выводится из цепи и частота вращения двигателя увеличивается. На 3-й позиции замкнуты все четыре пальца и реостат полностью выведен из цепи.
Система непосредственного управления может быть применена только для двигателей небольшой мощности и при сравнительно невысоком напряжении в контактной сети. Объясняется это следующим. Когда мощность двигателей значительна, в момент разрыва цепи тока будет возникать электрическая дуга, погасить которую при такой системе переключений трудно. К контроллеру подводится полное напряжение контактной сети, что создает опасность для обслуживающего персонала. Кроме того, чтобы обеспечить достаточную электрическую прочность изоляции, контроллер пришлось бы делать очень больших размеров. Поэтому на электровозах система непосредственного управления не применяется.
В системе с косвенным управлением (рис. 89) аппараты силовой цели приводятся в действие электропневматическим, электромагнитным или электродвигательным приводами. Машинист, осуществляя переключения в цепи управления, включает или выключает эти приводы.
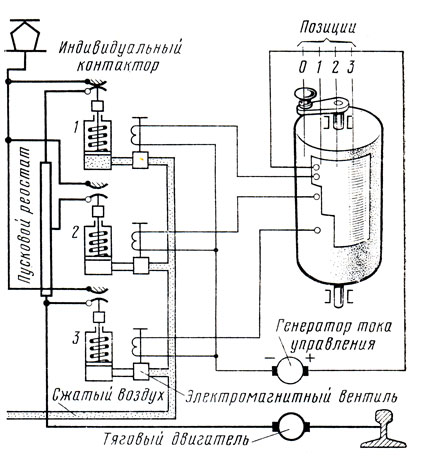
Рис. 89. Схема включения контроллера машиниста при косвенном управлении тяговыми двигателями
Как и в системе с непосредственным управлением, основным аппаратом цепи управления является контроллер машиниста. Однако здесь этот аппарат производит переключения не непосредственно в силовой цепи, работающей под высоким напряжением и с большими токовыми нагрузками, а в низковольтной цепи управления.
Машинист, вращая рукоятку контроллера, подключает провода цепи управления к источнику электрической энергии в строго определенной последовательности. При этом срабатывают соответствующие аппараты силовой цепи и их контакты замыкаются либо размыкаются. На 1-й позиции сегмент барабана контроллера замыкает цепь управления, в которую включена катушка электропневматического привода контактора 1 (это положение показано на рис. 89). Контактор включается и замыкает цепь тяговых двигателей. Пусковой, реостат полностью вводится в силовую цепь. На 2-й позиции контроллера замыкается контактор 2 и часть пускового реостата отключается. На 3-й позиции включается контактор 3. Реостат полностью выводится из цепи, и двигатели работают на автоматической характеристике.
На современных электровозах машинист с помощью контроллера осуществляет пуск тяговых двигателей, переключает их с одного соединения на другое, производит ослабление возбуждения, изменяет направление движения, электровоза, переключает двигатели в генераторный режим. Несмотря на многочисленность функций контроллера, для простоты управления его стремятся выполнить с минимальным числом рукояток.
Контроллер машиниста (рис. 90) имеет рукоятки - главную, реверсивную и для управления ослаблением возбуждения. На электровозах с электрическим торможением рукоятка ослабления возбуждения используется и как тормозная - для регулирования тока рекуперации. Кроме того, в этом случае добавляется еще одна рукоятка - селективная, необходимая для переключения двигателей, работающих в генераторном режиме, с одного вида соединения на другой.
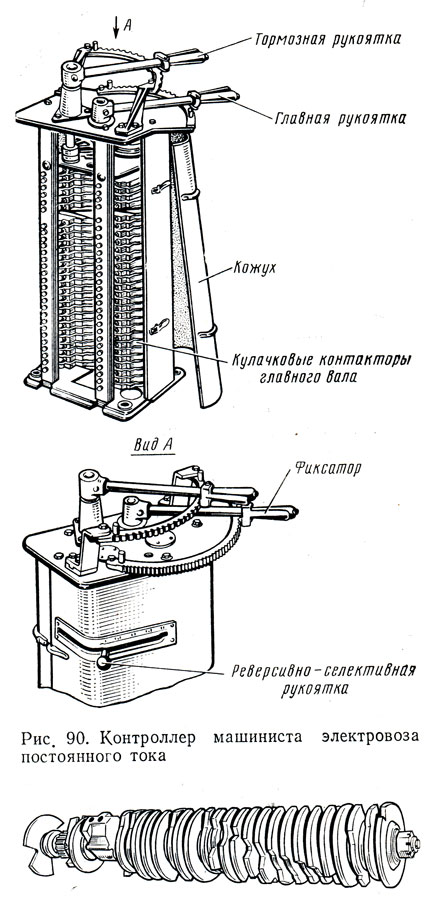
Рис. 90. Контроллер машиниста электровоза постоянного тока. Рис. 91. Главный кулачковый вал контроллера машиниста
Каждая рукоятка снабжена устройством, фиксирующим ее в различных положениях (позициях). Рукоятки контроллера располагают так, чтобы машинисту было удобно ими пользоваться. Специальные механические блокировки не допускают ошибочных перемещений рукояток в процессе управления электровозом. Например, главную рукоятку нельзя перевести, если реверсивная находится в нейтральном (нерабочем) положении, и, наоборот, машинист не может повернуть реверсивную рукоятку, пока главная находится не в нулевом положении. Благодаря этому исключается возможность случайного реверсирования тяговых двигателей под нагрузкой.
Реверсивную рукоятку делают съемной, ее можно вынуть только при нулевом (исходном) положении остальных рукояток. На электровоз выдается одна реверсивная рукоятка. Поэтому машинист при переходе из одной кабины управления в другую обязательно поставит все рукоятки в нулевое положение.
Рукоятку ослабления возбуждения можно перевести из положения "Полное возбуждение" в одно из положений "Ослабленное возбуждение" только тогда, когда главная рукоятка занимает положение, соответствующее какой-либо ходовой позиции.
На современных электровозах устанавливают контроллеры кулачкового типа. Когда машинист переводит главную рукоятку контроллера с одной позиции на другую, поворачивается связанный с ней главный кулачковый вал. На вал насажен ряд фасонных дисков (кулачковых шайб) с впадинами и выступами (рис. 91). Против каждой шайбы на стойках укреплены подвижные и неподвижные контакты (контактные элементы), к которым присоединены провода цепей управления. Если выступ диска касается ролика, то контакты разомкнуты (рис. 92, а). Как только впадина диска подойдет к ролику, он провалится в нее и под действием пружины контакты замкнутся (рис. 92, б), а значит, замкнется цепь, в которую включен контакторный элемент, и соответствующий аппарат сработает. Следовательно, очередность замыкания и размыкания проводов цепи управления и, как результат, очередность переключения аппаратов силовой цепи будут зависеть от взаимного расположения впадин и выступов кулачковых шайб контроллера.
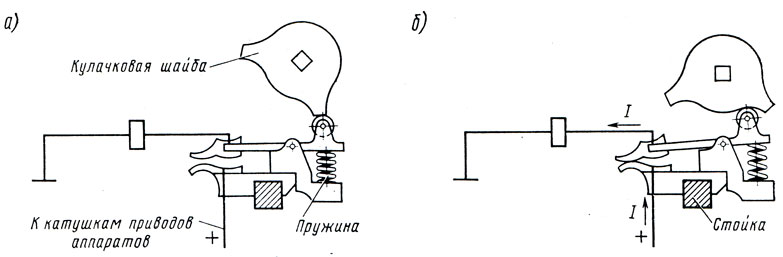
Рис. 92. Схема контакторного элемента в разомкнутом (а) и замкнутом (б) положениях
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://railway-transport.ru/ 'Железнодорожный транспорт'